Projects

MoCap Indoor Drone Swarm
An indoor drone swarm testbed using motion capture for precise localization, coordinated flight, and repeatable experiments
View More

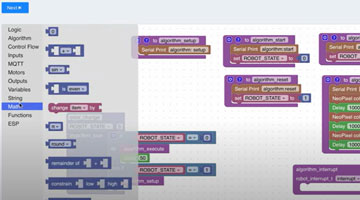
Programming and Compiler Toolchain for Multi-Agent Systems
The aim is to design an Integrated Development Environment to build software for multi-agent systems. The IDE shall provide facilities to compose algorithms at a high-level (ideally in a visual manner), and compile them over multiple stages into binaries and program the hardware over-the-air (OTA).
View More
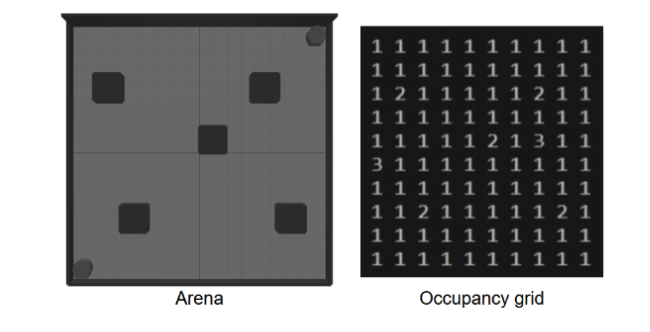
Simultaneous Localization and Mapping in Mixed Reality Environment
The study delves into the realm of swarm robotics, where agents collaborate to efficiently explore and map unknown environments...
View More
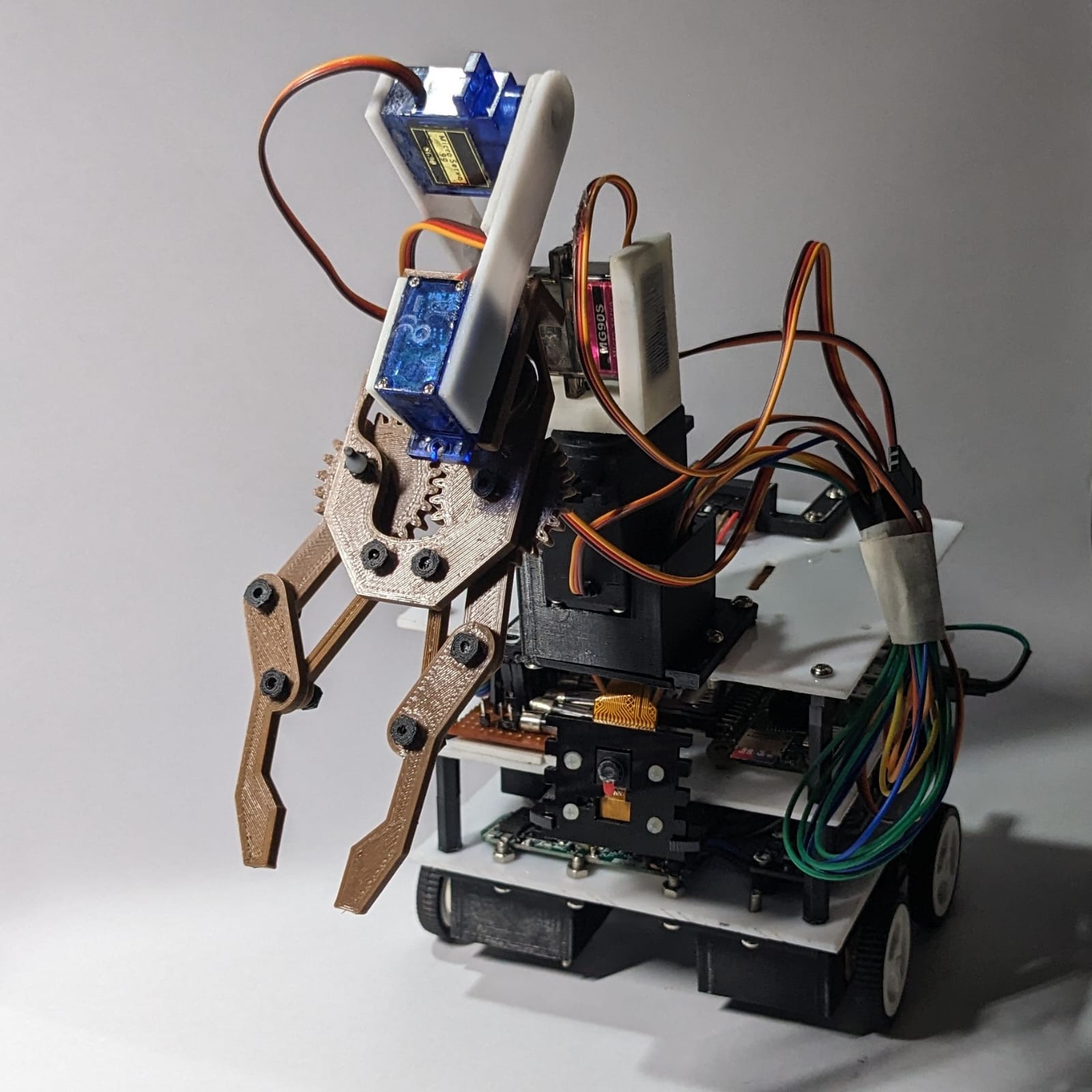
Modular Swarm Robot
Pera Swarm's Swarm Capable and Reconfigurable Agent is its first modular robot system, designed to...
View More
Swarm Intelligence Programming Framework
A high-level programming and compiler framework for Swarm Robotics
View More

Mixed Reality Environment for Swarm Robotics Simulations
An open-source Mixed-Reality Simulator and a Visualizer to simulate Swarm Intelligence behaviors
View More
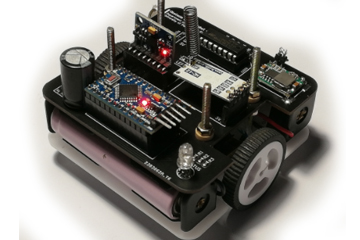
Obstacle Bots for Swarm Robots
Obstacle bots for the existing swarm research project of the Department of Computer Engineering, University of Peradeniya. These robots can create a challenging patterns using movements in a self-created potential surface with collision-avoiding.
View More

A GUI for Controlling and Supervising Multiple Robots Remotely
General purpose swarm robots with a GUI to monitor and control them remotely
View More

A Programming Framework for Robot Swarms Project
Pair-behaviors, neighbor-cluster behaviors for aggregation and pattern formation global behaviors
View More
Application of Swarm Intelligence in Multi-Robot Systems
Application of swarm intelligence with general purpose robots
View More