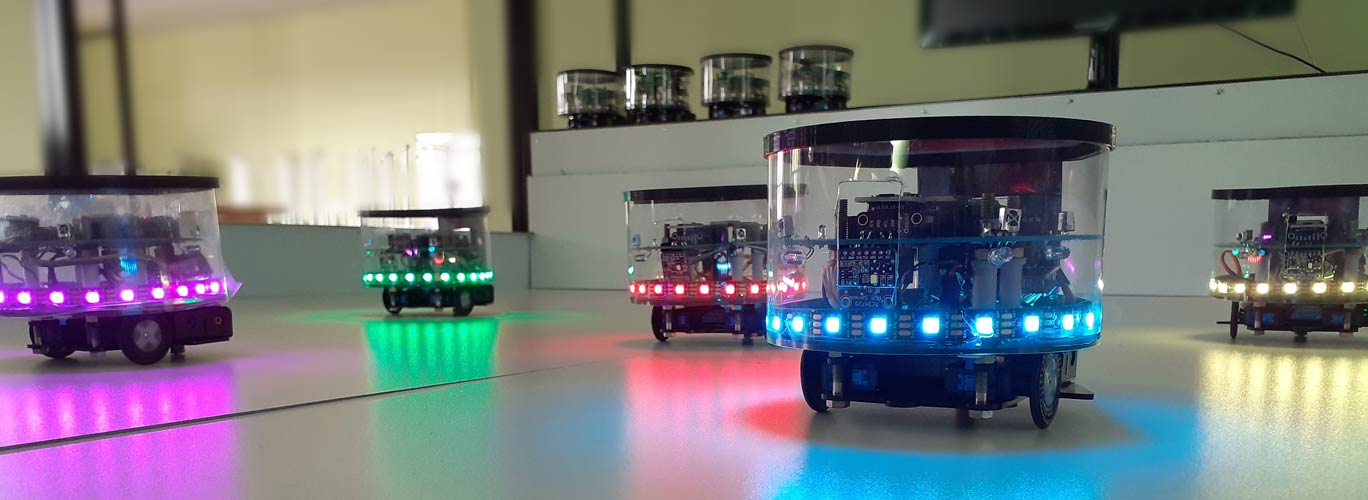
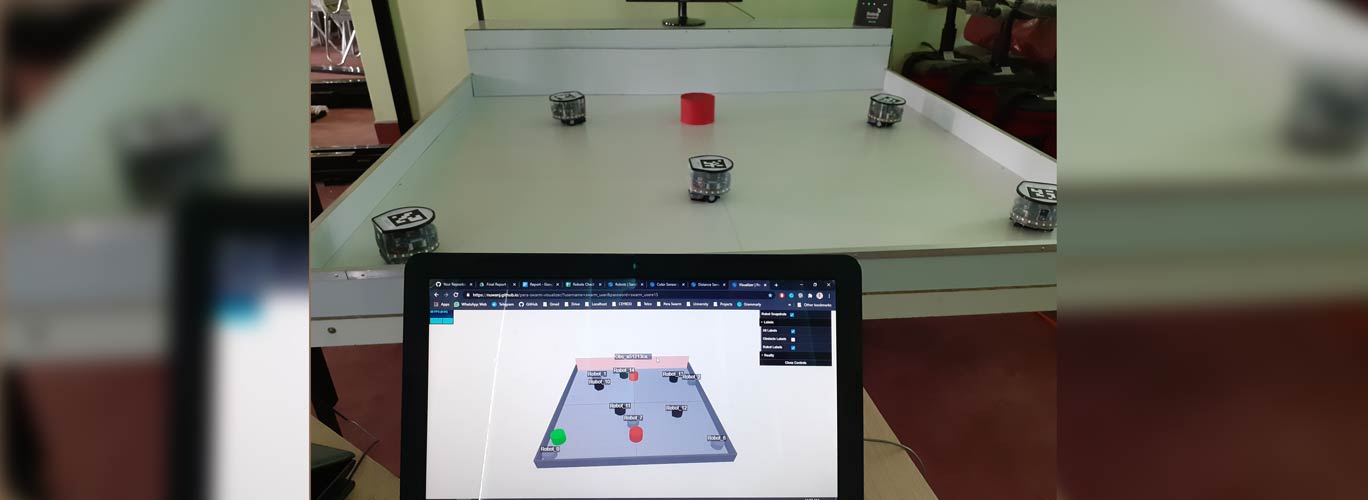

Pera-Swarm explores the powerful combination of Swarm Robotics and Mixed Reality (MR) to create a seamless integration between the real and virtual worlds. The project demonstrates how physical robots can interact with virtual environments in real time, paving the way for applications that merge simulation with tangible operations.
Swarm Robotics, inspired by the collective intelligence of nature, focuses on how multiple robots can coordinate as a system to perform complex tasks efficiently. When enhanced with Mixed Reality, these robot swarms are not only visible in their physical form but can also be extended, manipulated, and observed in immersive digital spaces.
Another research work by Pera-Swarm, "Simultaneous Localization and Mapping with Cost Effective Sensors" was presented at the 2025 International Research Conference on Smart C...
Read More

The Department of Computer Engineering, University of Peradeniya, is proud to present Pera-Swarm, an innovative research project, at EngEx 2025, the grand exhibition cele...
Read More
Mixed-Reality based Swarm Robot Simulation Framework is one of the main outcomes of the Pera-Swarm project, and the first paper publication under the project is now published ...
Read More

We conducted an “Introduction Session” for enthusiastic students of the Faculty of Engineering, University of Peradeniya, on Swarm Robotics and show...
Read More

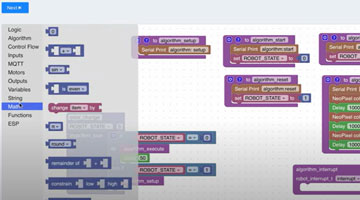
The aim is to design an Integrated Development Environment to build software for multi-agent systems. The IDE shall provide facilities to compose algorithms at a high-level (ideally in a visual manner), and compile them over multiple stages into binaries and program the hardware over-the-air (OTA).
View More
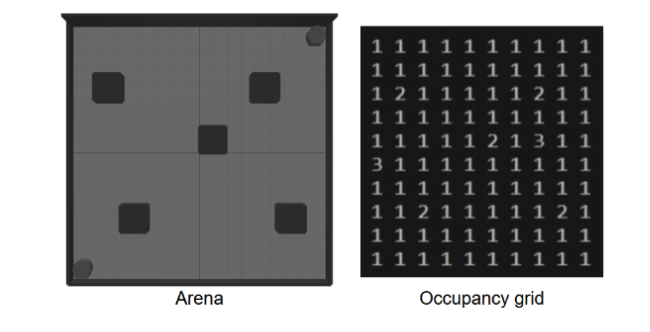
The study delves into the realm of swarm robotics, where agents collaborate to efficiently explore and map unknown environments...
View More
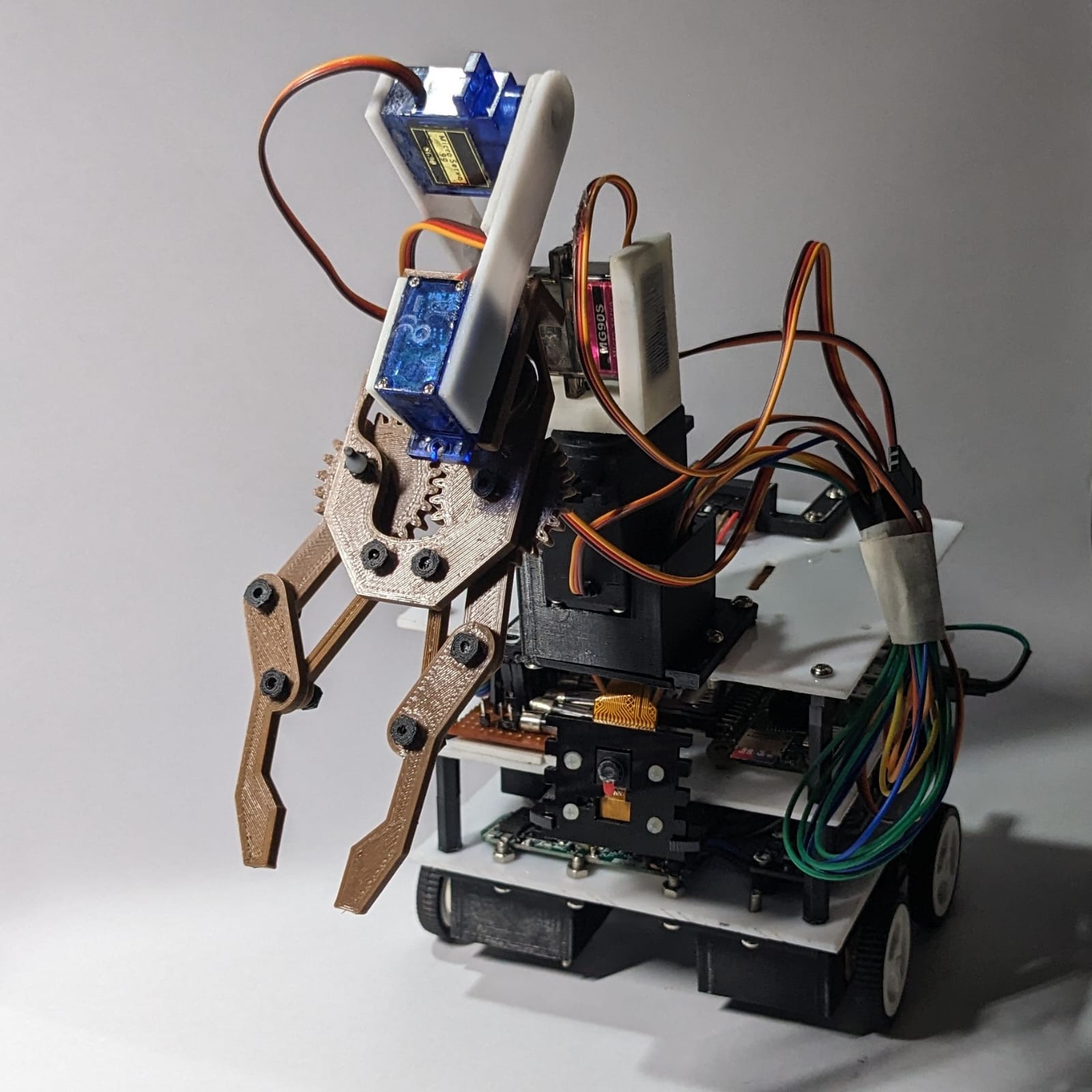
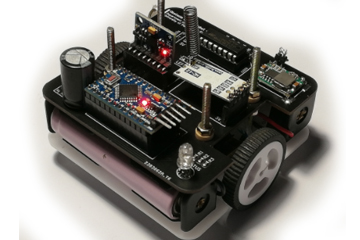
Pera Swarm's Swarm Capable and Reconfigurable Agent is its first modular robot system, designed to...
View More
A high-level programming and compiler framework for Swarm Robotics
View More

An open-source Mixed-Reality Simulator and a Visualizer to simulate Swarm Intelligence behaviors
View More
Obstacle bots for the existing swarm research project of the Department of Computer Engineering, University of Peradeniya. These robots can create a challenging patterns using movements in a self-created potential surface with collision-avoiding.
View More

General purpose swarm robots with a GUI to monitor and control them remotely
View More

Pair-behaviors, neighbor-cluster behaviors for aggregation and pattern formation global behaviors
View More
Application of swarm intelligence with general purpose robots
View More